- Create Unity 3D project
- Inside Assets directory of your project create ForceSeatMI directory
- Copy following files into ForceSeatMI directory (for the reference you can check any of our Unity 3D examples)
- ForceSeatMI.cs
- ForceSeatMI_Common.cs
- ForceSeatMI_Positioning.cs
- ForceSeatMI_Status.cs
- ForceSeatMI_TactileTranscuders.cs
- ForceSeatMI_Telemetry.cs
- ForceSeatMi_UnityAeroplane.cs
- ForceSeatMi_UnityVehicle.cs
| ForceSeatMI API uses DLL which is installed as part of the ForceSeatPM software. Make sure that you have ForceSeatPM installed on your computer. |
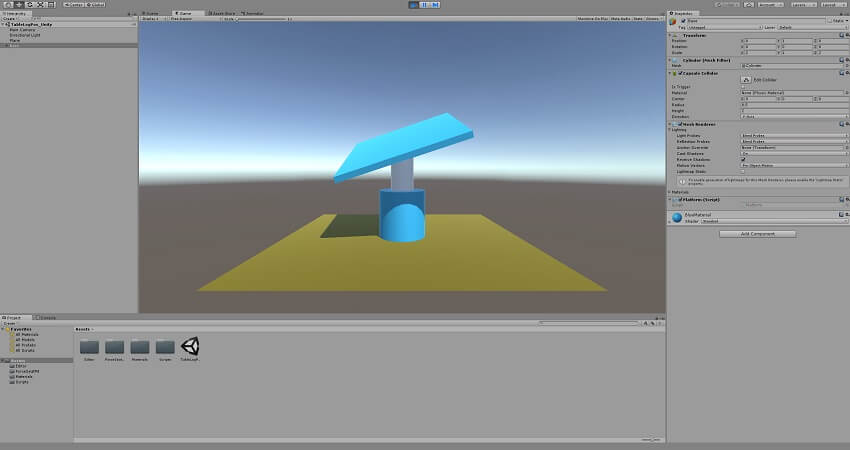
Application: position control
Examples:
- TableLogPos_Unity shows positioning in abstract(logical, percents) units
- TablePhyPos_Unity shows positioning in real world units (Inverse Kinematics)
For both examples, use built-in ForceSeatPM profile
SDK – Positioning.
Positioning application requires usage of raw ForceSeatMI API. Typical operation routine consists of following steps:
- Import ForceSeatMI
- Create an API object variable inside your class:
private ForceSeatMI m_fsmi;
- Initialize it in Start method:
m_fsmi = new ForceSeatMI();
- If everything is loaded call:
if (m_fsmi.IsLoaded())
{
m_fsmi.BeginMotionControl();
}
- The SIM should send positioning data in constant intervals using one of the following functions:
m_fsmi.SendTopTablePosLog(...);
m_fsmi.SendTopTablePosPhy(...);
m_fsmi.SendTopTableMatrixPhy(...);
- At the end of simulation call:
if (m_fsmi.IsLoaded())
{
m_fsmi.EndMotionControl();
m_fsmi.Dispose();
}
Code
Below code comes from
TableLogPos_Unity example.
// FSMI api
private ForceSeatMI m_fsmi;
// Position in logical coordinates that will be send to the platform
private FSMI_TopTablePositionLogical m_platformPosition = new FSMI_TopTablePositionLogical();
void Start ()
{
// Load ForceSeatMI library from ForceSeatPM installation directory
// ForceSeatMI - BEGIN
m_fsmi = new ForceSeatMI();
if (m_fsmi.IsLoaded())
{
// Find platform's components
m_shaft = GameObject.Find("Shaft");
m_board = GameObject.Find("Board");
SaveOriginPosition();
SaveOriginRotation();
// Prepare data structure by clearing it and setting correct size
m_platformPosition.mask = 0;
m_platformPosition.structSize = (byte)Marshal.SizeOf(m_platformPosition);
m_platformPosition.state = FSMI_State.NO_PAUSE;
// Set fields that can be changed by demo application
m_platformPosition.mask = FSMI_POS_BIT.STATE | FSMI_POS_BIT.POSITION;
m_fsmi.BeginMotionControl();
SendDataToPlatform();
// ForceSeatMI - END
}
else
{
Debug.LogError("ForceSeatMI library has not been found!Please install ForceSeatPM.");
}
}
void OnDestroy()
{
// ForceSeatMI - BEGIN
if (m_fsmi.IsLoaded())
{
m_fsmi.EndMotionControl();
m_fsmi.Dispose();
}
// ForceSeatMI - END
}
private void SendDataToPlatform()
{
// Convert parameters to logical units
// ForceSeatMI - BEGIN
m_platformPosition.state = FSMI_State.NO_PAUSE;
m_platformPosition.roll = (short)Mathf.Clamp(m_roll / DRAWING_ROLL_MAX * PLATFORM_POSITION_LOGIC_MAX, PLATFORM_POSITION_LOGIC_MIN, PLATFORM_POSITION_LOGIC_MAX);
m_platformPosition.pitch = (short)Mathf.Clamp(m_pitch / DRAWING_PITCH_MAX * PLATFORM_POSITION_LOGIC_MAX, PLATFORM_POSITION_LOGIC_MIN, PLATFORM_POSITION_LOGIC_MAX);
m_platformPosition.heave = (short)Mathf.Clamp(m_heave / DRAWING_HEAVE_MAX * PLATFORM_POSITION_LOGIC_MAX, PLATFORM_POSITION_LOGIC_MIN, PLATFORM_POSITION_LOGIC_MAX);
// Send data to platform
m_fsmi.SendTopTablePosLog(ref m_platformPosition);
// ForceSeatMI - END
}
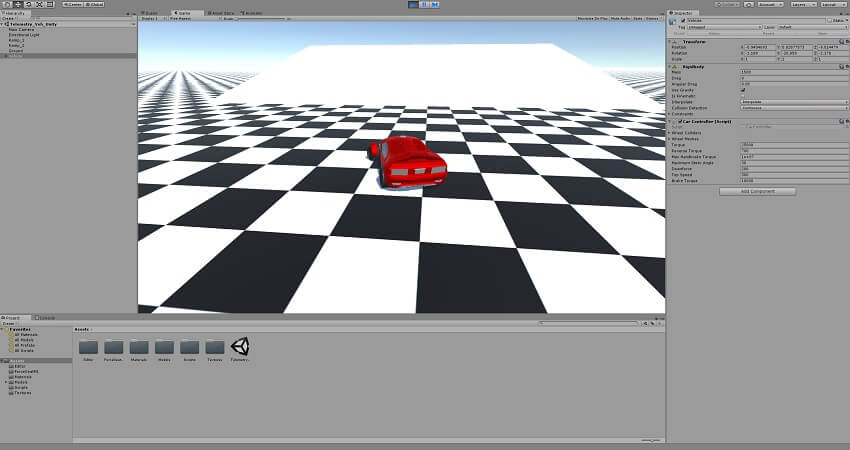
Application: vehicle simulation
Examples: Telemetry_Veh_Unity (use built-in ForceSeatPM profile
SDK – Vehicle Telemetry)
For vehicle simulation application ForceSeatMI_UnityVehicle helper interface can be used. Typical operation routine consists of following steps:
- Create an API object variable inside your class:
private ForceSeatMI_UnityVehicle m_Api;
- Initialize it in Start method:
m_Api = new ForceSeatMI_UnityVehicle();
- Call:
- The SIM should send telemetry data in constant intervals using following function::
- At the end of simulation call:
Code
Below code comes from
Telemetry_Veh_Unity example.
private void Start()
{
m_Rigidbody = GetComponent();
// ForceSeatMI - BEGIN
m_Api = new ForceSeatMI_UnityVehicle();
m_Api.Begin();
// ForceSeatMI - END
}
private void OnDestroy()
{
// ForceSeatMI - BEGIN
m_Api.End();
// ForceSeatMI - END
}
private void Move(float steering, float accel, float footbrake, float handbrake)
{
...
// ForceSeatMI - BEGIN
m_Api.Tick(m_Rigidbody, Time.deltaTime, false, 0, 0, m_CurrentGearNumber);
// ForceSeatMI - END
}
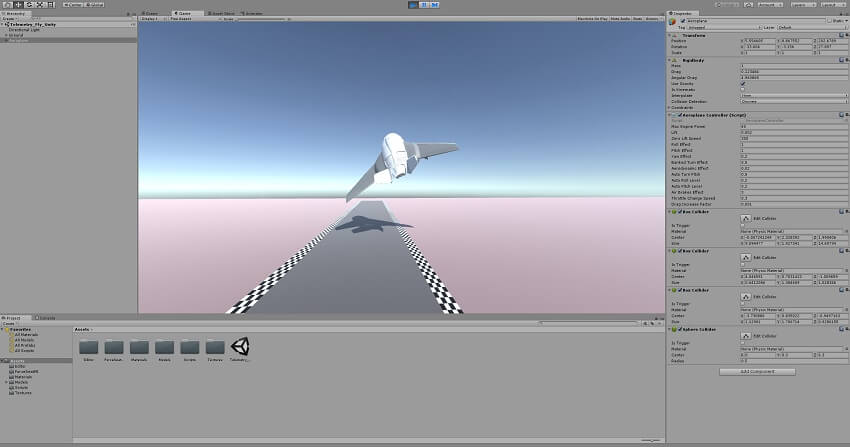
Application: flight simulation
Examples: Telemetry_Fly_Unity (use built-in ForceSeatPM profile
SDK – Plane Telemetry)
For flight simulation application ForceSeatMi_UnityAeroplane helper interface can be used. Typical operation routine consists of following steps:
- Create an API object variable inside your class:
private ForceSeatMi_UnityAeroplane m_Api;
- Initialize it in Start method:
m_Api = new ForceSeatMi_UnityAeroplane();
- Call:
- The SIM should send telemetry data in constant intervals using following function::
- At the end of simulation call:
Code
Below code comes from
Telemetry_Fly_Unity example.
private void Start()
{
m_Rigidbody = GetComponent();
m_OriginalDrag = m_Rigidbody.drag;
m_OriginalAngularDrag = m_Rigidbody.angularDrag;
// ForceSeatMI - BEGIN
m_Api = new ForceSeatMI_UnityAeroplane();
m_Api.Begin();
// ForceSeatMI - END
}
private void OnDestroy()
{
// ForceSeatMI - BEGIN
m_Api.End();
// ForceSeatMI - END
}
private void FixedUpdate()
{
...
// ForceSeatMI - BEGIN
m_Api.Tick(m_Rigidbody, Time.deltaTime, false);
// ForceSeatMI - END
}